Noviny zirok












Teos kietoo kehon tuhoutumattoman akselin ympärille. Vankka vartalon käärintärobotti
Kun kehoa ohjaa ympäröivä voima, sen energia kasvaa robotin kuluttaman määrän verran. Näin se on perinteisellä Venäjällä, tämän työn täytyy olla syrjäytysvoiman vuoksi. Kuitenkin liike koskee nyt robottia, kun materiaalipistettä siirretään, eikä se pysähdy. Koska Runko on ehdottoman kiinteä, silloin käytetään paljon voimaa, vaikka se kohdistetaan tarkasti, koko kehon kääntämiseen.
Kun käännytään nurkkaan, ilmoituspiste pakottaa ohittamaan tien. Millä robotilla on aiempi lisäys voiman projektiossa suorassa siirtymässä vähennyksen määrällä: ; 3 fig. on selvää, että - voiman olkapää ja - voiman hetki.
Todi on yksinkertainen robotti: . Jotain sellaista.
Työ kietoo kehon lisääntyneen kineettisen energian ympärille
; Korvattuamme hylkäämme: mikä on dynamiikan taso: se on siis selvää. ne samat virazit.
6. Ei-inertiaaliset järjestelmät tulevaisuudessa
Robotin loppu -
Tämä aihe kuuluu tähän osioon:
Eteenpäinliikkeen kinematiikka
Mekaniikan fyysiset perusteet. eteenpäinliikkeen kinematiikka.. mekaaninen liike perusmuodon mukaan.
Mitä tarvitset lisämateriaalia tästä aiheesta, koska etsijät eivät tienneet, suosittelemme, että haet nopeasti tietokannastamme:
Mitä voimme tehdä poistetulle materiaalille:
Jos tämä materiaali kiinnostaa sinua, voit tallentaa sen sosiaalisen median sivullesi:
| Tweet |
Kaikki tämän osion aiheet:
Mekaaninen Rukh
Aine on ilmeisesti olemassa kahdessa muodossa: ulkonäössä ja kentässä. Ennen ensimmäistä muotoa ovat atomit ja molekyylit, joista kaikki kappaleet syntyvät. Kaiken tyyppisiin kenttiin viitataan toisella tyypillä: painovoima.
Laajenna sitä tuntia
Kaikki ruumiit nousevat ja putoavat avoimessa tilassa koko ajan. Nämä käsitteet ovat perustavanlaatuisia kaikille luonnontieteille. Voiko rungon mitoittaa sitten. sen tilavuus
Vidliku järjestelmä
Kehon sijainnin yksiselitteiseksi määrittämiseksi tietyllä hetkellä on tarpeen valita erillinen järjestelmä - vuosien varrella varmistettu koordinaattijärjestelmä, joka on tiiviisti yhdistetty ehdottoman kiinteään runkoon,
Rukhin kinemaattinen kilpailu
Venäjällä koordinaatit muuttuvat ajan myötä, joten lain mukaan on ilmoitettava toiminnon tyyppi
Liikkeet ovat alkeellisia liikkeitä
Anna pisteen M pudota A:sta kaarevalle tielle AB. Aluksi sädevektori on ikivanha
Preskorennya. Normaali ja tangentiaalinen kiihtyvyys
Pisteen pyörimiselle on ominaista myös kiihtynyt nopeus ja nopeuden muutos. Kuinka nopeasti piste on yli tunnin ajan?
Progressiivinen Rukh
Yksinkertaisin kiinteän kappaleen mekaaninen liike on translaatioliike, jossa kappaleen kahta pistettä yhdistävä suora viiva liikkuu samanaikaisesti kehon kanssa menettäen yhdensuuntaisen asemansa. sen
Hitauden laki
Klassinen mekaniikka perustuu Newtonin kolmeen lakiin, jotka hän muotoili teoksessaan "Mathematical Concepts of Natural Philosophy", joka julkaistiin vuonna 1687. Nämä lait olivat nerouden tulosta
Inertiajärjestelmä taustalla
On selvää, että mekaaninen liike ja sen luonne voivat olla tulevaisuudessa järjestelmän valinnassa. Newtonin ensimmäinen laki ei päde kaikkiin järjestelmiin. Esimerkiksi kehon tulee makaa tasaisella pinnalla
Masa. Newtonin toinen laki
Kehon virtauksen annettujen ominaisuuksien päädynamiikka riippuu niihin lisätyistä voimista. On selvää, että voiman vaikutuksen alaisena
Aineellisen pisteen dynamiikan perussääntö
Rivnyanya kuvaa kehon varren ja pään mittojen muutosta voiman vaikutuksesta muodonmuutosten ja niin edelleen esiintymisen vuoksi.
Newtonin kolmas laki
Huomaa, että yhden kappaleen mekaaninen vaikutus toiseen on aina vuorovaikutuksessa. Jos kappale 2 on yhtä suuri kuin kappale 1, niin kappale 1 on sidottu kappaleeseen.
Galileon uudelleenluominen
Niiden avulla voidaan laskea kinemaattiset arvot siirtymisen aikana inertiajärjestelmästä toiseen. Otetaan se
Galileon pätevyysperiaate
Minkä tahansa pisteen kiihtyvyys kaikissa järjestelmissä yleensä, jotka romahtavat yksitellen suorassa ja tasaisesti:
Arvot tallennetaan
Olipa kyseessä ruumis tai kappaleiden järjestelmä, se on kokoelma aineellisia pisteitä tai hiukkasia. Tällaisen järjestelmän sijainti kulloinkin mekaniikassa on määritetty määritettyihin koordinaatteihin ja nopeuksiin
Keskusta mas
Jokaiselle hiukkasjärjestelmälle voit löytää pisteen, jota kutsutaan massakeskukseksi
Rivnyannya rukh center mas
Dynaamiikan peruslaki voidaan kirjoittaa toisessa muodossa, kun tiedetään massajärjestelmän keskipiste:
Konservatiiviset voimat
Kuten sinne sijoitetun hiukkasen ihoavaruudessa on voima, näyttää siltä, että osa on usein voimien kentässä, esimerkiksi painovoiman, painovoiman, Coulombin ja muiden voimien kentässä. Ala
Keskusvoimat
Herätetäänkö voimakenttä laulavan kehon vai kehon toiminnan vaikutuksesta. Teho, joka per hiukkanen on tässä kentässä
Voimakentän osan potentiaalienergia
Se, että konservatiivisen voiman robotti (kiinteää kenttää varten) sijoittaa vain hiukkasten loppu- ja pääteasemat kentän lähelle mahdollistaa tärkeiden fysikaalisten käsitteiden esittelyn.
Konservatiivisen kentän potentiaalienergian ja voiman välinen yhteys
Osien vuorovaikutusta emittoivien kappaleiden kanssa voidaan kuvata kahdella tavalla: voiman lisäkäsitteellä tai potentiaalienergian lisäkäsitteellä. Ensimmäinen menetelmä on huonompi, koska pysähtyneisyydessä ja voimissaan
Voimakentän osan kineettinen energia
Anna osan massasta romahtaa voimaan
Osan täysi mekaaninen energia
On selvää, että osan liike-energian kasvu voimakentässä liikkuessa tarkoittaa, että kaikkien voimien perinteinen alkeistyö voi vaikuttaa osaan:
Osien mekaanisen energian säilymislaki
On selvää, että pysyvässä konservatiivisten voimien kentässä mekaaninen energia voi usein muuttua
Kinematiikka
On mahdollista kääntää kehoa
Osan impulssin hetki. voiman hetki
Energian ja impulssin välissä on toinen fysikaalinen suure, joka liittyy säilymislakiin - impulssin hetki. Osan impulssin hetki
Impulssin momentti ja voimamomentti akselilla
Katsotaanpa järjestelmää, joka riittää kertomaan meille, että kaikki on ehjä
Järjestelmän impulssimomentin säilymislaki
Katsotaanpa järjestelmää, joka koostuu kahdesta keskenään vuorovaikutuksessa olevasta osasta, joilla on myös ulkoisia voimia.
Tällä tavalla suljetun osajärjestelmän impulssihetki muuttuu pysyväksi eikä muutu ajan myötä
Tämä pätee inertiajärjestelmän mistä tahansa pisteestä riippumatta: . Järjestelmän ympäröivien osien impulssihetket m
Kiinteän kappaleen hitausmomentti
Katsotaan vartaloa mahdollisimman tarkasti
Kiinteän vartalon kääreen dynamiikan taso
Kiinteän kappaleen kiertymisen suhteellinen dynamiikka voidaan määrittää kirjaamalla merkittävän akselin ympäri kiertyvän kiinteän kappaleen suhteelliset momentit
Kehon kineettinen energia, joka muuttuu
Katsotaanpa ehdottoman kiinteää kappaletta, joka kiertyy sen läpi kulkevan tuhoutumattoman akselin ympärille. Leikataan se pienin sitoumuksin ja massoin palasiksi
Subcentraalinen hitausvoima
Katsotaanpa kiekkoa, joka kietoutuu pussin ympärille neulepuikalle venytetyllä jousella, kuva 5.3. Kulka tunnetaan
Coriolis-voima
Kun keho on vahva, joka kääntyy ympäri, ilmestyy toinen voima - Coriolis-voima tai Coriolis-voima
Mali Kolivannya
Tarkastellaan mekaanista järjestelmää, jonka sijainti voidaan määrittää lisäsuureen, esimerkiksi x:n, avulla. Tällä tavalla näyttää siltä, että järjestelmällä on yksi vapauden taso. Koko x voi olla
Harmoninen melodia
Kunnioittaminen Newtonin toiselle laille ilman hankausvoimia kvasijousivoimalle näyttää tältä:
Matemaattinen heiluri
Tse aineellinen kohta, ripustettu venymättömälle langalle pitkällä venytyksellä niin, että pystytasossa on jatkuva värähtely
Fyysinen heiluri
Tämä on kiinteä runko, joka voidaan takoa runkoon yhdistetyn rikkoutumattoman akselin ympärille. Kaikki on kohtisuorassa vauvaan nähden ja niin edelleen
Lakkaavaa rokkaamista
Todellisessa kolivalisysteemissä on vahva tuki, joka johtaa muutokseen järjestelmän potentiaalienergiassa ja koliva sammuu.
Avtokolivannya
Kun värähtelyt sammuvat, järjestelmän energia muuttuu vähitellen ja värähtely lakkaa. Jotta niistä tulisi sammumattomia, on tarpeen täydentää soittojärjestelmän energiaa tällä hetkellä
Vimusheni Kolivannya
Koska koliaalijärjestelmä on tukivoimien lisäksi alttiina ulkoisille jaksollisille voimille, jotka muuttuvat harmonisen lain mukaan
Resonanssi
Vaikuttavien värähtelyjen amplitudin kestokäyrä tuodaan siihen pisteeseen, että kun lauletaan tietylle järjestelmälle
Jousen keskiosan leventäminen
Jos asetat vasaran mihin tahansa jousiväliaineen (kiinteä, harvinainen, kaasumainen) paikkaan, niin hiukkasten välisen vuorovaikutuksen kautta vasara laajenee keskelle osissa jopa vuodeksi.
Tasaisten ja pallomaisten neulojen ruostetta
Hvilin arvo ilmaisee yhteenlaskettujen osien sijainnin ja niiden koordinaatit,
Khvylyov Rivnyanya
Kilpailu ja päätökset erotustaso, jota kutsutaan nimellä hvilovim. Tätä asennusta varten löydämme muut yksityiset tunneittain ja koordinaatit alueelta
Yakshcho m.t. kääntyy paalun ympäri, siihen kohdistuu voima, sitten kun käännytään yhteen nurkkaan, suoritetaan perustoiminto:
 (22)
(22)
Koska seremoniallinen voima on potentiaalinen, niin
todi (24)
Jännitys käärittynä
Mittin kireys, joka kehittyy, kun vartaloa kääritään:
Kehon kineettinen energia, joka muuttuu
Aineellisen pisteen kineettinen energia. Materiaalipisteiden kineettinen energia ![]() . Koska , Otamme pois kääreen liike-energian ilmaisun:
. Koska , Otamme pois kääreen liike-energian ilmaisun:
![]()
Tasaisella pinnalla (sylinteri pyörii ohutta pintaa pitkin) täydellinen juoksevuus on sama:
de - Sujuvuus sylinterin keskelle.

Koko kehon kineettisen energian määrä, joka liikkuu kehon keskustaan ja kehon keskustaan liikkuvan kehon liike-energia, sitten:
![]() (28)
(28)
Visnovok:
Ja nyt, kun olemme tarkastelleet kaikkea luentomateriaalia, katsomalla pussia, voimme määrittää etupuolen ja lateraalirungon suuruuden ja tason:
| Progressiivinen Rukh | Obertalny Rukh | ||
| Masa | m | Hitausmomentti | minä |
| Tapa | S | Leikkaa käänteeseen | |
| Shvidkistost | Kutovan sileys | ||
| Impulssi | Hetki impulssille | ||
| Priskorennya | Kutove skorennya | ||
| Ulkoisten voimien tasapaino | F | Ulkoisten voimien momenttien summa | M |
| Päädynamiikkataso | Päädynamiikkataso | ||
| Robotti | Fds | Robottikääre | |
| Kineettinen energia | Kineettisen energian kääre |
Lisäys 1:


Ihminen seisoo Žukovski-laavan keskellä ja muuttuu samalla siitä inertiaan. Kiertotaajuus n 1 = 0,5 s -1. Hitausmomentti j o ihmisten ruumiit

Yleensä käärintäakseli on 1,6 kg m 2. Kädet ojennettuina ihmiset trimmaavat painoja painoilla m= 2 kg ihoa. Seiso painojen välissä l 1 = l,6 m. Merkittävästi käärintätaajuus n 2 , Tule toimeen ihmisten kanssa, jos luovutat ja nouset seisomaan l 2 painojen välillä tulee yhtä suureksi kuin 0,4 m. Tartu laavan hitausmomenttiin.
Symmetrian voima ja säilymislait.
Energiansäästö.
Mekaniikassa nähtävien säilymislakien perusta on tilan ja ajan voimassa.
Energiansäästö liittyy ajan tasaisuuteen, liikemäärän säästö tilan tasaisuuteen ja liikemäärän säästö tilan isotropiaan.
Lähdemme energian säilymisen laista. Olkoon hiukkasjärjestelmä jatkuvasti mielessä (tämä tarkoittaa, että järjestelmä on suljettu tai vakaa, kunnes stabiili ulkoinen voimakenttä tulee sisään); Sideaineet (jotka haisevat) ovat ihanteellisia ja paikallaan pysyviä. Tässä tapauksessa tunti ei homogeenisuutensa vuoksi pääse selkeästi Lagrangen funktioon. Toimiva Samaisuus tarkoittaa kaikkien hetkien samanarvoisuutta samalla tunnilla. Siksi hetken korvaaminen toisella muuttamatta koordinaattien arvoa ja hiukkasten juoksevuutta ei vaadi järjestelmän mekaanisen tehon muuttamista. Tämä on tietysti totta siinä mielessä, että hetken korvaaminen toisella ei muuta mielipiteitä, joissa järjestelmä sijaitsee, mikä on riippumaton ulkoisen kentän ajasta (jollain tavalla tämä kenttä voi olla ulkoinen).
Myös suljetulle järjestelmälle, mikä on sama suljetulla voimakentällä, .
Hankausvoima suoristuu välittömästi pohjassa olevan liitoksen pinnan yli ulottuen pohjaan. Vaughn zavzhdi mensch vahvuudesta normaali pahe.
Tässä:
F- gravitaatiovoima, jonka ansiosta kaksi kappaletta vetävät toisiaan puoleensa (Newton),
m 1- Ensimmäinen kehon massa (kg),
m 2- toisen ruumiin massa (kg),
r- seisoa massakeskipisteiden välissä (metri),
γ
- painovoimavakio 6,67 10 -11 (m 3 /(kg s 2)),
Gravitaatiokentän voimakkuus- Vektorisuure, joka kuvaa gravitaatiokenttää tietyssä pisteessä ja painovoiman numeerista suhdetta, joka vaikuttaa kehoon, sijoitettuna Annan pisteen kentät, kehosi painovoimamassaan:
12. Tutkittuamme kiinteiden kappaleiden mekaniikkaa olemme tutkineet ehdottoman kiinteän kappaleen käsitettä. Luonnossa ei kuitenkaan ole täysin kiinteitä kappaleita, koska... Kaikki todelliset kappaleet muuttavat sitten muotoaan ja kokoaan voimien virran vaikutuksesta. muuttaa muotoaan.
Muodonmuutos nimeltään kevät, koska sen jälkeen kun ulkoiset voimat ovat lakanneet vaikuttamasta kehoon, keho saa takaisin alkuperäisen kokonsa ja muotonsa. Kehoon ulkoisten voimien vaikutuksen jälkeen jääviä muodonmuutoksia kutsutaan muovi(tai ylihinnoiteltu)
TYÖ JA JÄNNITTELY
Robottivoimat.
Robotti paikallaan oleva voima mitä se tekee vartalolle, joka romahtaa suorassa linjassa?
de - kehon siirtymä, - kehoon kohdistuva voima. 
Robotissa on vaihteleva voima, joka vaikuttaa vartaloon, joka romahtaa kaarevaa lentorataa pitkin  . Työ mitataan jouleina [J].
. Työ mitataan jouleina [J].
Työskentely voimamomentilla, joka vaikuttaa vartaloon, joka kiertyy horjumattoman akselin ympärille de - voimamomentti, - käännöksen kulma.
U zaganalny vipadku.
Robotin runko on muuttanut itsensä kineettiseksi energiakseen.
Työntää- robotin tuntihinta (1 s): . Jännitys mitataan watteina [W].
14.Kineettinen energia- Mekaanisen järjestelmän energia, joka varastoituu rukhu її -pisteen juoksevuuteen. Usein nähdään eteen- ja taaksepäin liikkeen kineettinen energia.
Katsotaanpa järjestelmää, joka koostuu yhdestä osasta, ja kirjoitetaan toinen Newtonin laki:
Kaikkien kehon läpi virtaavien voimien tulos. Kerrotaan linjaus skalaarisesti kappaleen siirtymällä. Vrahovayuchi, scho, Otrimaemo:

Jos järjestelmä on suljettu, niin  , ja arvo
, ja arvo
muuttuu muuttumattomaksi. Tätä määrää kutsutaan kineettinen energia osat. Koska järjestelmä on eristetty, kineettinen energia on kiinteä osa virtausta.
Täysin kiinteälle kappaleelle kokonaiskineettinen energia voidaan kirjoittaa eteenpäin- ja taaksepäin liikkeen kineettisen energian summana:
![]()
Masa tila
Sujuvuutta kehon öljyn keskelle
Kehon hitausmomentti
Kuta kehon pehmeys.
15.Mahdollinen energia- skalaarifyysinen suure, joka luonnehtii kappaleen (tai materiaalipisteen) alkuperää robotissa sen läsnäolon avulla voimien toimintakentässä.
16. Jousen venyminen tai puristus johtaa jousen muodonmuutoksen potentiaalisen energian varastoimiseen. Jousen kääntäminen suoraan asentoon johtaa jousen muodonmuutoksen varastoidun energian vapautumiseen. Tämän energian koko on sama:
 Jousen muodonmuutoksen potentiaalinen energia.
Jousen muodonmuutoksen potentiaalinen energia.
 - jousivoiman työ ja jousen muodonmuutoksen potentiaalienergian muutos.
- jousivoiman työ ja jousen muodonmuutoksen potentiaalienergian muutos.
17.konservatiiviset voimat(Potentiaaliset voimat) - voimat, joita ei voida rajoittaa liikeradan muotoon (kansi vain voimaraportoinnin loppu- ja loppupisteissä). Merkitys tulee esiin: konservatiiviset voimat ovat samoja voimia, jotka toimivat missä tahansa suljetussa lentoradassa ennen 0:ta
Dissipatiiviset voimat- voimat, kun he vaikuttavat mekaaniseen järjestelmään, sen mekaaninen energia muuttuu (hajoaa) muuttuen muiksi, ei-mekaanisiksi energiamuodoiksi, esimerkiksi lämmöksi.
18. Kiertyy tuhoutumattoman akselin ympärille Sitä kutsutaan sellaiseksi kiinteän kappaleen romahdukseksi, jossa romahduksen hetkellä kahdesta pisteestä tulee tuhoutumaton. Näiden pisteiden läpi kulkevaa suoraa linjaa kutsutaan kokonaiseksi kääreeksi. Kaikki muut kappaleen pisteet romahtavat tasoissa, jotka ovat kohtisuorassa käärintäakseliin nähden, pitkin paaluja, joiden keskipisteet ovat kietoutumisakselilla.
Hitausmomentti- skalaarinen fyysinen suure, inertiamaailma fyysisellä Venäjällä akselin ympäri, samanlainen kuin ruumiinpaino on hitausmaailma fyysisellä Venäjällä. Sille on tunnusomaista massojen jakautuminen kehossa: hitausmomentti on alkuainemassojen luomisen kokonaismäärä neliötä kohden niiden korkeudesta pohjaan kertomalla (pisteet, suorat ja pinta-ala).
Mekaanisen järjestelmän hitausmomentti Järkymättömälle akselille ("aksiaalinen hitausmomentti") kutsutaan suuruutta J a, mikä on massojen nykyinen luovuuden määrä? n järjestelmän materiaalipisteet niiden etäisyyksien neliöissä akseliin:
![]() ,
,
§ m i- Masa i-ї pistettä,
§ r i- nouse ylös i-ї osoittaa akselille.
Osovy hitausmomentti kehon J a Kehon hitausaste yleisesti Venäjällä akselin ympäri on samanlainen kuin kehon massan aste inertian suunnassa asento-Venäjällä.
 ,
,
Kiinteän kappaleen käärintäprosessin kinemaattista kuvausta varten on tarpeen ottaa käyttöön seuraavat käsitteet, kuten rajasiirtymä Δφ, rajakiihtyvyys ε ja katkaisun juoksevuus ω:
ω = ∆ ∆ t , (∆ t → 0) , ε = ∆ ∆ t , (∆ t → 0) .
Kuti ilmaistaan radiaaneina. Positiivisen suunnan saamiseksi kääre otetaan suoraan vuosipäivänuolta vasten.
Jos kiinteä kappale on kiedottu horjumattoman akselin ympärille, kaikki sen kappaleen pisteet liikkuvat samalla sujuvuudella ja kiihtyvyydellä.
Malyunok 1. Kierrä levy akselin ympäri kulkeaksesi sen keskustan O läpi.
Koska kulman siirtymä Δ φ on pieni, massaelementin Δ m lineaarisen siirtymävektorin moduuli ∆ s → kääritty kiinteä aine voidaan ilmaista seuraavilla termeillä:
∆ s = r ∆ ϕ,
jossa r– sädevektorimoduuli r → .
Kelan ja lineaarisen nesteen moduulien väliin voit asentaa liitännät johdonmukaisuuden lisäämiseksi
Lineaariset ja helikaaliset kiihtyvyysmoduulit on myös kytketty toisiinsa:
a = a τ = r ε.
Vektorit v → ta a → = a τ → suoraan säteeseen r.
Meidän on myös tunnistettava normaalin tai esikeskittymisen syyllinen, mitä Venäjällä aina tapahtuu.
Viznachennya 1
Kiihtyvyysmoduuli ilmaistaan kaavalla:
a n = v 2 r = ω 2 r.
Jos jaat käärittävän kappaleen pieniksi paloiksi Δ m i , sinun tulee lähestyä käärintäakselia läpi r i, ja lineaarisen juoksevuuden moduulit v i:n kautta, jolloin kehon kinesteettisen energian kaavan kirjoittaminen näyttää tältä:
E k = ∑ i ν m v i 2 2 = ∑ i ∆ m (r i ω) 2 2 = ω 2 2 ∑ i ∆ m i r i 2 .
Vicennia 2
Fysikaalista suurta ∑ i ∆ mi r i 2 kutsutaan kappaleen hitausmomentiksi I käärintäakselin ympäri. Aseta se rungon osaan, joka kiertyy käärintäakselin ympärille:
I = ∑ i ∆ m i r i 2 .
Rajalla Δ m → 0 tämä summa muunnetaan integraaliksi. Hitausmomentin yksikkö C I – kilogramma - neliömetri (k g m2). Siten horjumattoman akselin ympäri kääntyvän kiinteän kappaleen kineettinen energia voidaan nähdä muodossa:
E k = I ω 2 2 .
Sen lausekkeen lisäksi, jota olemme käyttäneet kuvaamaan liikkuvan ohuen kappaleen kinesteetistä energiaa m v 2 2 massan korvaaminen m kaava sisältää hitausmomentin minä. Otamme myös huomioon lineaarisen juoksevuuden korvaamisen leikkausjuoksuudella ω.
Koska eteenpäinliikkeen dynamiikkaa esittää kehon massan päärooli, pyörimisliikkeen dynamiikkaa pelaa hitausmomentti. Jos massa on kiinteän kappaleen voima, näyttää siltä, että jos se ei ole juoksevuuden ja muiden tekijöiden vaikutuksen alainen, niin hitausmomentti riippuu siitä, minkä akselin ympärille keho kiertyy. Saman kappaleen hitausmomentti määräytyy kääreen eri akselien mukaan.
Useimmiten on tärkeää, että kiinteän kappaleen koko kääre kulkee sen massan keskipisteen läpi.
Aseta x C, y C massan keskelle kahden hiukkasen järjestelmän yksinkertaista pudotusta varten, joiden massat ovat m 1 ja m 2 ja jotka on levitetty tasoon. X Y pisteissä, joiden koordinaatit ovat x 1, y 1 ja x 2, y 2 määritetään seuraavilla lausekkeilla:
x C = m 1 x 1 + m 2 x 2 m 1 + m 2, y C = m 1 y 1 + m 2 y 2 m 1 + m 2 .

Malyunok 2. Massajärjestelmän keskus, jossa on kaksi hiukkasta.
Vektorimuodolla on seuraava ulkoasu:
r C → = m 1 r 1 → + m 2 r 2 → m 1 + m 2 .
Samoin monien hiukkasten järjestelmässä sädevektori r C → massakeskipiste määräytyy
r C → = ∑ m i r i → ∑ mi .
Koska oikealla on kiinteä kappale, joka muodostuu yhdestä osasta, niin r C →:n indusoitu lauseke on korvattava integraaleilla.
Tasaisen painokentän massakeskus siirtyy pois painopisteestä. Tämä tarkoittaa, että jos otamme taittuvan muotoisen kappaleen ja ripustamme sen akselin keskelle, niin homogeenisessa kentässä kappaleen painovoima on vakio. Tämä osoittaa, kuinka taittuvan kappaleen massakeskipiste määritetään käytännössä: se on ripustettava johdonmukaisesti useista pisteistä ja samalla merkitään pystyviiva ääriviivaa pitkin.

Kuva 3. Taitetun vartalovoin keskiasento. A 1, A 2, A 3 jousituspisteet.
Vartalo asetetaan vauvan päälle, ripustetaan massan keskipisteeseen. Vono on Baiduja Rivnovagan leirillä. Tasaisessa kentässä massan keskipisteeseen kohdistetaan yhtä suuret painovoimat.
Voimme havaita minkä tahansa kiinteän kappaleen liikkeen kahden liikkeen summana. Ensimmäinen askel on päästä eroon kehon nestekeskuksesta. Toinen on kääre akselin ympärillä, joka kulkee emättimen keskustan läpi.
Peppu 1
Hyväksyttävä. Meillä on pyörä, joka rullaa vaakasuoralla pinnalla luistamatta. Kaikki pyörän pisteet romahtavat kokoon saman tason suuntaisesti. Tällaista rockia voidaan pitää tasaisena.
Vicenzennya 3Kiinteän kappaleen kinesteettinen energia, joka kiertyy akselin ympäri, joka vedetään massan keskipisteen läpi ja laajenee kohtisuoraan tasangoilla, joissa kaikki kehon pisteet romahtavat:
E k = m v C 2 2 + I C ω 2 2
de m- Povna masa tila, Minä C- kappaleen hitausmomentti akselin keskipisteen läpi kulkevan akselin suhteen.

Kuva 4. Pyörän vieriminen pyörän eteenpäinliikkeen seurauksena nopeudesta v C → pyöriminen taaksepäin nopeudella ω = v C R massakeskipisteen kautta kulkevalle akselille O.
Mekaniikka vikorista lause massan keskelle.
Lause 1
Oli kyse sitten kehosta tai useista vuorovaikutuksessa olevista elimistä, jotka ovat yksi järjestelmä, hinaa massakeskiötä. Tämä massakeskus liikkuu ulkoisten voimien vaikutuksesta avaruuden poikki aineellisena pisteenä, johon järjestelmän koko massa on keskittynyt.
Kuvasimme pikkuisen päällä kiinteän kappaleen kiveä, joka kohdistaa painovoiman. Kehon keskipiste romahtaa pitkin paraabelia lähellä olevaa lentorataa, kun taas kehon muiden pisteiden liikerata on taittuvampi.

Malyunok 5. Kiinteän kehon romahtaminen raskauden tulvan alla.
Katsotaanpa pudotusta, kun kiinteä kappale romahtaa horjumatonta akselia pitkin. Tämän hitauskappaleen hitausmomentti minä voidaan määrittää hitausmomentin avulla Minä C jonka runko on kohdistettu akselin kanssa, joka kulkee rungon keskikohdan läpi ja on yhdensuuntainen etuosan kanssa.

Kuva 6. Todistetaan käärintäakselin yhdensuuntaista siirtoa koskeva lause.
Peppu 2
Esimerkiksi runko on melko kova, jonka muoto on riittävä. Massakeskipiste C on merkitsevä. Viberemo-koordinaattijärjestelmä X koordinaattitähkä 0. Kokonaismassakeskipiste ja koordinaattien origo.
Toinen akseleista kulkee massan C keskipisteen läpi. Toinen on täysin vääristynyt ja piste P on melko lähellä, kun sitä liikutetaan telineessä d näkymä koordinaateista. Ilmeisesti pieni elementti tämän kiinteän kappaleen massasta Δ m i.
Määritetylle hitausmomentille:
I C = ∆ m i (x i 2 + y i 2) , I P = ∑ mi (xi - a) 2 + y i - b 2
Viraz varten Minä P Voit kirjoittaa sen uudelleen Viglyadissa:
I P = ∆ ∆ m i (x i 2 + y i 2) + ∑ ∆ m i (a 2 + b 2) - 2 a ∆ m i x i - 2 b ∑ ∆ m i y i .
Yhtälön kaksi jäljellä olevaa termiä muunnetaan nollaksi ja koordinaattien fragmentit alkavat lähestyä kappaleen keskustaa.
Näin päädyimme Steinerin lauseen kaavaan käärintäakselin rinnakkaissiirrosta.
Lause 2
Varsin jäykän akselin ympäri kääntyvän kappaleen hitausmomentti on Steinerin lauseen tapaan yhtä suuri kuin sen kappaleen hitausmomenttien summa, joka on yhdensuuntainen massan keskipisteen la läpi kulkevan akselin kanssa, ja kehon massan lisääminen neliötä kohti akselien välillä.
I P = IC + m d 2 ,
de m- Povna masa tila.

Malyunok 7. Hitausmomentin malli.
Alla oleva kuva esittää erimuotoisia homogeenisia kiinteitä kappaleita ja esittää näiden kappaleiden hitausmomentit massakeskipisteen läpi kulkevalla akselilla.

Kuva 8. Erilaisten homogeenisten kiinteiden aineiden hitausmomentit IC.
Näissä tilanteissa, jos meillä on oikealla kiinteä kappale, joka kääntyy horjumattomana akselina, voimme vahvistaa toisen Newtonin lain. Alla olevalla vauvalla kuvasimme riittävän muotoista kiinteää vartaloa, joka kiertyy oikean akselin ympärille, joka kulkee pisteen O kautta. Koko kääre on venytetty kohtisuoraan vauvan pintaan nähden.
Δ m i on hyvin pieni elementti massasta, johon ulkoiset ja sisäiset voimat virtaavat. Kaikkien voimien tasapaino on F i → . Se voidaan jakaa kahteen varastoon: alivarastoon F i τ → ja säteittäiseen F i r → . Säteittäinen varasto F i r → luo apulaisprofessorin kiihdytyksen a n.

Malyunok 9. Dotichna F i τ → і säteittäinen F i r → varastointivoima F i → kiinteä kappale, joka vaikuttaa elementtiin Δ m i.
Stosovnan varasto F i τ → huutaa tangentiaalisesti kiihdytettynä a i τ → masi Δ m i. Toinen Newtonin laki, joka on kirjoitettu skalaarimuodossa, antaa
∆ m i a i τ = F i τ sin θ tai ∆ m i r i ε = F i sin θ
de ε = a i τ r i - kiinteän kappaleen kaikkien pisteiden Kutovo-kiihtyvyys.
Jos kirjoitetun loukkaavat osat ovat enemmän kuin yhtä suuret, kerro se luvulla r i, sitten hylkäämme:
∆ m i r i 2 ε = F i r i sin θ = F i l i = M i .
Tässä l i on voimavarsi, F i → M i on voiman momentti.
Nyt sinun on kirjoitettava samanlaiset suhteet kaikille massan Δ elementeille m i kiinteä runko, joka on kääritty, ja lisää sitten vasen ja oikea osa. Tämä antaa:
∑ ∆ mir r i 2 ε = ∑ M i .
Oikealla puolella olevien voimien momenttien summa, jotka vaikuttavat kiinteän kappaleen eri pisteisiin, on kaikkien ulkoisten voimien momenttien summa ja kaikkien momenttien summa. sisäisiä voimia.
∑ M = ∑ M i ulkoinen + ∑ M i sisäinen.
Jos kaikkien sisäisten voimien momenttien summa Newtonin kolmannen lain mukaan on nolla, niin oikealla puolella vain kaikkien ulkoisten voimien momenttien summa menetetään, mikä on merkittävä M. Näin saimme perusymmärryksen ympäröivän kiinteän kappaleen dynamiikasta.
Vicenchennya 4
Kutovon kiihtyvyys ε ja voimien momentti M joiden yhtäläiset ovat algebrallisia suureita.
Pyydä positiivista suoraa käärettä ja vie se suoraan Jumalan nuolta vasten.
Käärityksen dynamiikan päätasosta on mahdollista kirjoittaa vektorimuoto, jolle arvot ω → ε → M → on merkitty vektoreiksi suoraan kääreen akselia pitkin.
Kehon progressiivista liikettä käsittelevässä osiossa esittelimme käsitteen kehon impulssi p → . Noudattamalla analogiaa kääntöpuolen liikkeen eteenpäinliikkeen kanssa, otamme käyttöön impulssin hetken käsitteen.
Viznachennya 5
Kehon impulssin hetki, joka kääntyy– tämä on fysikaalinen määrä, joka vaikuttaa kehon hitausmomenttiin minä tämän kääreen viileydestä.
Impulssin hetken osoittamiseen käytetään latinalaista kirjainta L.
Oskolki ε = ∆ ω ∆ t; ∆ t → 0, oberval rukin tasoa voidaan soveltaa seuraavalla tavalla:
M = I ε = I ∆ ω ∆ t tai M ∆ t = I ∆ ω = ∆ L .
Välinpitämätön:
M = ∆ L ∆ t; (∆t → 0) .
Otimme seremonia pois syksylle, jos I = c o n s t. Tämä pätee myös, jos kehon hitausmomentti muuttuu liikeprosessissa.
Se on hullu hetki M kehoon vaikuttavat ulkoiset voimat ovat nolla, jolloin impulssin momentti L = I ω niin, että tämä akseli tallennetaan: ∆ L = 0, koska M = 0.
Viznachennya 6
Otje,
L = l ω = c o ns t.
Näin noudatimme hetken ja impulssin säilymisen lakia.
Peppu 3
Kuten peppu, katsotaan pieniä, jotka kuvaavat ei-jousen muotoisia, ympärille kiertyviä kiekkoja, jotka on asennettu heille kokonaisuuteen.

Malyunok 10. Jousiton, kahden levyn kierreliitos. Momentin ja impulssin säilymislaki: I 1 ω 1 = (I 1 + I 2) ω.
Olemme suljetun järjestelmän oikealla puolella. Kaikissa suljetuissa järjestelmissä liikemäärän säilymislaki on voimassa. Se päättyy sekä mekaniikkakokeiden että avaruuden mielissä, kun planeetat romahtavat kiertoradalla peilin ympärillä.
Voimme tallentaa globaalin roottorin dynamiikan tasapainon horjumattomaksi akseliksi sekä tasaisesti ja kiihtyvyydellä liikkuvaksi akseliksi. Kateuden ilme ei muutu vain siksi, että kaikki romahtaa nopeasti. Tästä syystä kaksi mieltä voivat yhdistyä: kaikki kulkee kehon massan keskuksen läpi, ja suoraan avaruudessa siitä tulee muuttumaton.
Peppu 4
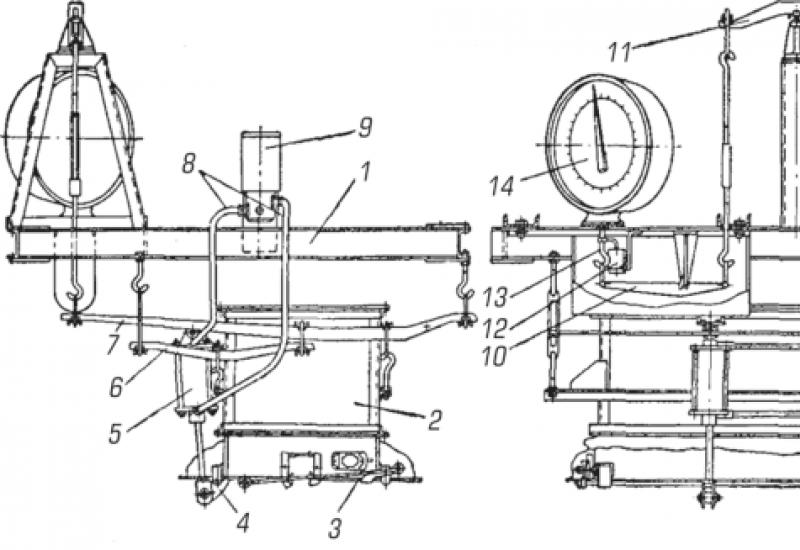
Oletetaan, että meillä on runko (runko tai sylinteri), joka kiertyy leveän pinnan yli jonkin verran kitkaa.

Malyunok 11. Symmetrisen kappaleen vieriminen matalalla pinnalla.
Kaikki kääre O kulkea kehon keskikohdan läpi. Gravitaatiovoiman momentit m g → ja reaktiovoimat N → akseli O yhtä kuin nolla. Hetki M Se luo lisää voimaa hankaamalla: M = F t r R .
Obertaali Ruhun kilpailu:
I C ε = IC a R = M = F t r R ,
de ε – kutova skorennya tila, scho to roll, a- Lineaarinen kiihtyvyys massakeskipisteeseen, Minä C– hitausmomentti akselin suhteen O, mitä viedä massan keskustan läpi.
Toinen Newtonin laki massakeskuksen eteenpäinliikkeelle on kirjoitettu seuraavasti:
m a = m g sin α - F t r.
Näiltä tasoilta F t r mukaan lukien otamme pois loput:
α = mg sin θ I C R 2 + m .
Tämä osoittaa, että ohuessa kappaleessa on helpompi liikkua, jolloin hitausmomentti pienenee. Esimerkiksi jäähdyttimelle IC = 2 5 m R 2 ja kiinteälle yksisylinteriselle IC = 1 2 m R 2. Ozhe, kulya hyppää sylinterin yli.
Jos olet merkinnyt tekstiin palveluksen, katso se ja paina Ctrl+Enter
Katsotaanpa kiinteää kappaletta, joka voidaan kääriä kääreen tuhoutumattoman akselin ympärille.
Sanokaamme F i- Ulkoinen voima kohdistetaan jokaiseen alkuainemassaan ∆m i kiinteä ruumis ja kääre huutaa. Lyhyessä ajassa on helppo siirtyä robotin luo ja sitten voimalla voittaa
missä a – missä suorien voimien ja siirtymien välillä. Ale on kalliimpaa F t on voiman projektio massavirtaan, joka on yhtä suuri kuin lentorata, ja suuruus. Otje
On helppo huomata, että lisäys on voimamomentti tiettyä käärintäakselia pitkin z ja koskee runko-osaa D m i. No, robotti on kalliimpi
Mukaan lukien kehon kaikkiin elementteihin kohdistettu voimamomentti, se otetaan pois erittäin pienelle energiamäärälle, joka kuluu kehon hyvin pieneen pyörimiseen. d j:
![]() , (2.4.27)
, (2.4.27)
de - kaikkien ulkoisten voimien tuloksena oleva momentti, jotka vaikuttavat kiinteään kappaleeseen tiettyä pyörimisakselia pitkin z.
Työskentele viimeisen tunnin ajan t
![]() . (2.4.28)
. (2.4.28)
Liikemäärän ja avaruuden isotropian säilymislaki
Liikemäärän säilymislaki on fyysisen liikkeen dynamiikan peruslain seuraaja. Järjestelmässä on P Kaikkien sisäisten voimien vektorisumman keskinäiset hiukkaset (kappaleet) ja siten voimien momentit, jotka ovat yhtä kuin nolla, ja momenttien differentiaalinen tasaus voivat ilmaantua
de – Koko järjestelmän impulssin viimeinen momentti on ulkoisten voimien tuloksena oleva momentti.
Järjestelmä on suljettu
Tähdet perässä
mikä on mahdollista
Momentin ja impulssin säilymislaki: Suljetun hiukkasjärjestelmän (kiintoainejärjestelmän) impulssihetki muuttuu pysyväksi.
Impulssin momentin säilymislaki on periytyvä avaruuden isotropia, jossa suljetun järjestelmän fyysiset ominaisuudet ja liikelait ovat inertiavertailujärjestelmien suorien koordinaattiakselien valinnassa.
Suljetussa järjestelmässä on kolme fyysistä määrää: energia, impulssiі impulssin hetki(mukaan lukien koordinaattien ja nopeuksien funktiot) tallennetaan. Näitä toimintoja kutsutaan Rukh-integraalit. Järjestelmässä on P osia löytyy 6 n-1 Tehon integraalit ja aditiivisuuden voima sisältävät niistä vain kolme - energian, impulssin ja impulssin momentin.
Gyroskooppinen vaikutus
Massiivinen symmetrinen kappale, joka kietoutuu suurella sileäleikkauksella symmetria-akselin ympärille, on ns. gyroskooppi.
Gyroskooppi, kääreen haamut, ei pidä akselinsa suuntaa muuttumattomana ilmaantuvassa tilassa hetken ja impulssin säilymisen laki. Gyroskooppi on vakaampi, mitä suurempi on kääreen joustavuus ja sitä suurempi on gyroskoopin hitausmomentti käärintäakselilla.
Heti kun gyroskooppi käännetään ympäri, kohdista pari voimaa sen ensimmäisen akselin kääntämiseksi kohtisuoraan gyroskoopin kääreen akseliin nähden, sitten se kääntyy kolmannen akselin ympäri, kohtisuorassa kahteen ensimmäiseen nähden (kuva 21). Tätä vaikutusta kutsutaan gyroskooppinen vaikutus. Tästä johtuvaa vallankumousta kutsutaan precessionaariseksi vallankumoukseksi tai precessio.

Mikä tahansa kappale, joka kiertyy akselin ympäri, on precessoitu, koska nyt on voimassa momentti, joka on kohtisuorassa käärintäakseliin nähden.
Precession rukhun takapuoli voi olla lapsen lelun käyttäytyminen, jota kutsutaan jigoyaksi tai jigoyuksi. Maapallo Presessoi myös Kuukauden gravitaatiokentän virtauksen alla. Maahan Kuun puolelta vaikuttavien voimien hetken osoittaa maan geometrinen muoto - pallosymmetrian tosiasia. s її "litistetty".
Gyroskooppi*
Katsotaanpa raportin precessionaarista liikettä. Tällainen asema toteuttaa massiivisen levyn, joka on asennettu pystysuoraan kaikki on niin kuin käy. Levyssä on impulssimomentti, joka on suoristettu levykääreen akselia pitkin (kuva 22).
Gyroskooppi, jonka pääelementti on levy D, mikä on ruotsalaisuuden tulos? vaakasuoraan kirveet MENNÄ vinikne viileä hetki shodo point C ja oikaisuimpulssin momentti käärintäkiekon akselia pitkin D.
Koko gyroskooppi on saranoitu pisteessä C. Kiinnitys on laskuria K vasten. Jos laskuri on asennettu niin, että piste Cє massajärjestelmän keskipiste ( m- Gyroskooppi Masa; m 0 – Masa antigagi Ennen; Masa strizhnya on epäkunnioittavan pieni), kirjoitamme sitten ilman hymyä:
Tällöin tuloksena oleva järjestelmään vaikuttava voimamomentti on nolla.
Tämä on oikeudenmukainen vauhdin säästämisen laki:
Toisin sanoen tässä tapauksessa const; de J- Gyroskoopin hitausmomentti - Gyroskoopin kääreen paksuus.
 |
Niin kauan kuin kiekon hitausmomentti symmetria-akselilla on vakioarvo, myös kynsinauhan juoksevuusvektori muuttuu vakioksi sekä suuruudeltaan että suoraan.
Kiertoakselin oikaisuvektori on yhdenmukainen oikean ruuvisäännön kanssa. Tällä tavalla koko vapaa gyroskooppi säilyttää asemansa avaruudessa muuttumattomana.
Olen vastakkaisella puolella Ennen lisää massasta toinen m 1, silloin järjestelmän massan keskipiste siirtyy ja vääntömomentti kasvaa pisteeseen C. On varmaa, että hetket ovat tasa-arvoisia. Tällä hetkellä, joka päättyy, hetken vektori ja impulssi saavat inkrementin, joka on lähellä vektoria:
Painovoiman vektorit suoristetaan pystysuunnassa alaspäin. Sitten vektorit , ja sijaitsevat lähellä vaakatasoa. Noin tunnin kuluttua gyroskoopin impulssin hetki muuttuu arvoon, joka vastaa samaa arvoa.
Tällä tavalla vektori muuttaa suuntaa kohti avaruutta viettäen koko tunnin vaakatasoa lähellä. Lääkärit, mikä on gyroskoopin impulssin momentin vektori kääreen akselin suoristamiseksi, vektorin kääntämiseksi oikeaan kulmaan da tunnissa dt tarkoittaa kääreen akselin kääntämistä saman leikkauksen ympäri. Tämän seurauksena gyroskoopin koko symmetria kääntyy nyt horjumattoman pystyakselin ympäri. BB leikatulla nopeudella:
Tällaista vallankumousta kutsutaan säännöllinen precessio, Ja suuruus on precession äärinopeus. Kaikki on kiinni hetkestä MENNÄ Gyroskooppia ei ole asennettu vaakasuoraan, niin precession aikana se kuvaa kartiota avaruudessa pystyakselia pitkin. Hankausvoimien läsnäolo johtaa pisteeseen, jossa gyroskooppinen akseli muuttuu vähitellen. nutations.
On selvää, että gyroskoopin precessionopeus riippuu järjestelmän pääparametreista. Projisoimme kohdistuksen (123) täysin vaakasuoraksi, kohtisuoraan GO"
Geometrisistä kohdistamisesta (jako kuva 22) pienillä kiertokulmilla, sitten kulman precessioprecessio ilmaistaan:
Tämä tarkoittaa, että jos käytät jatkuvaa ulkoista voimaa gyroskooppiin, se pyörii useammin kolmannen akselin ympäri, joten se ei mene suoraan pääroottoriin.
Precessio, jonka suuruus on verrannollinen voiman suuruuteen, heikentää pystysuunnan orientaatiota ja tukipinnan ympärillä voi esiintyä tärinää. Kun olet irrottanut laitteet, sinun on tehtävä muutoksia suuntaasi tällä hetkellä. Tämä vaikutus näkyy fysiikassa sekä gyroskooppisessa inertiassa. Kun virta on kohdistettu, kintaan precessio päättyy ja roottori jatkaa pyörimistään.
Levyssä on gravitaatiovoima, joka luo voimamomentin tukipisteen ympärille O. Tämä oikaisun hetki kohtisuorassa levykääreen akseliin nähden ja muinaisempia
de l 0- Seiso kiekon painopisteen edessä tukipisteeseen asti O.
Pyörimisliikkeen dynamiikan peruslain perusteella voimamomentti kasvaa tunnin välein dt kulmamomentin muutos
Vektorit ovat suoria yhtä suoraa pitkin ja kohtisuorassa käärintäakseliin nähden.
3 fig. 22 näet, että vektorin loppu on tunnin kuluttua dt siirry leikata
Korjattuaan suhteen merkityksen L, dlі M, peruttavissa
![]() . (2.4.43)
. (2.4.43)
sellaisella tavalla kutovaya siirtymä siirtymä vektorin lopussa :
ja levyn käärintäakselin yläpää on kuvattu lähellä vaakatasoa (kuvio 21). Tämän tyyppistä kehon romahtamista kutsutaan precessio, ja itse vaikutus gyroskooppinen vaikutus.





KIINTEÄAINEIDEN MUOTOMUUTOKSET
Todelliset kappaleet ovat ehdottoman kiinteitä, joten todellisia asioita tarkasteltaessa täytyy tunnistaa mahdollisuus muuttaa niiden muotoa muutosprosessin aikana, eli tunnistaa muodonmuutos. Muodonmuutos- tämä on muutos kiinteiden kappaleiden muodossa ja koossa ulkoisten voimien vaikutuksesta.
Muovin väsähtäminen- tämä on muodonmuutos, joka säilyy kehossa ulkoisten voimien käytön jälkeen. Deformaatiota kutsutaan kevät, Ulkoisten voimien vaikutuksesta keho saa tähkän kokoa ja muotoa.
Kaiken tyyppiset muodonmuutokset (venytys, puristus, pullistuminen, vääntö, puristaminen) voidaan vähentää venytys- (tai puristus) ja puristusmuodonmuutoksiksi, jotka ilmaantuvat välittömästi.
Jänniteσ on fysikaalinen suure, joka on numeerisesti yhtä suuri kuin jousivoima, joka osuu yhdelle kehon poikkileikkauksen alueelle (mitattuna Pa):
Jos voima on suoristettu normaaliksi pintaan nähden, niin jännite normaali, jos - schodo dotichny, niin jännite tangentiaalisesti.
Näkyvä muodonmuutos- nopea lähestyminen, joka luonnehtii muodonmuutosvaihetta ja määräytyy absoluuttisen muodonmuutoksen Δ asetuksella x ensisijaiseen arvoon x Mikä luonnehtii kehon muotoa ja kokoa: .
- elämän lopun muutosl nopea(Myöhäinen muodonmuutos) ε:
- pystysuunnassa poikittain venytetty (puristettu)ε′, de d- Hiustenleikkauksen halkaisija.
Muodonmuutoksilla ε ja ε′ on aina erilaisia merkkejä: ε′ = −με de μ - positiivinen kerroin, joka on materiaalin alaisuudessa ja jota kutsutaan nimellä Poissonin kerroin.
Pienillä muodonmuutoksilla ominaisvenymä ε on verrannollinen jännitykseen σ:
de E- Suhteellinen kerroin (kimmomoduuli), joka on numeerisesti yhtä suuri kuin jännitys, joka tapahtuu veden muodonmuutoksen aikana, mikä on samanlainen yksikkö.
Yksipuolista venytystä (puristusta) varten kutsutaan kimmomoduulia Youngin moduuli. Youngin moduuli muuttuu Pa.
Kirjoitettuaan ![]() , peruttavissa
, peruttavissa ![]() - Hooken laki:
- Hooken laki:
leikkausvoiman kiristämisellä jousen muodonmuutoksen aikana on verrannollinen vaikutus leikkausvoimaan(tässä k- Jousikerroin). Hooken laki pätee vain pienille muodonmuutoksille.
Kovuustekijän korvaamiseksi k Eli vain kehon voima, Jung-moduuli luonnehtii puheen voimaa.

Missä tahansa kappaleessa sen todellisesta merkityksestä lähtien muodonmuutos lakkaa olemasta joustavaa ja muuttuu muoviksi. Muovimateriaalit ovat materiaaleja, jotka eivät sortu jännityksen vaikutuksesta, vaan ne liikkuvat merkittävästi pintojen välillä. Muovivoiman ansiosta metallia (alumiinia, kuparia, terästä) voidaan käsitellä erilaisilla mekaanisilla prosessoinneilla: leimaamalla, takomalla, lävistämällä, venyttämällä. Kun muodonmuutos lisääntyy edelleen, materiaali romahtaa.
Häiriö - suurin jännite, joka esiintyy kehossa ennen sen romahtamista.

Pintojen ero puristuksen ja venytyksen aikana selittyy erolla kiinteiden aineiden molekyylien ja atomien välisissä vuorovaikutusprosesseissa näiden prosessien aikana.
Youngin moduuli ja Poissonin kerroin kuvaavat täysin isotrooppisen materiaalin jousivoimaa. Kaikki muut pysyvät jouset voidaan ilmaista läpi E ta μ.

Numeeriset tulokset osoittavat, että pienillä muodonmuutoksilla jännitys on suoraan verrannollinen laakerin jännitteeseen ε (leikkaus OA kaaviot) - Hooken lakia sovelletaan.
Koe osoittaa, että pieniä muodonmuutoksia esiintyy jännityksen poistamisen jälkeen (jousimuutoksia vältetään). Pienissä muodonmuutoksissa sovelletaan Hooken lakia. Kutsutaan maksimijännitettä, johon Hooken laki pätee suhteellisuuden rajaa σ p. Vin vahvistaa asian A kaavioita.
Jos jatkat jännityksen lisäämistä venytettäessä ja muutat suhteellisuutta, muodonmuutos muuttuu epälineaariseksi (viiva ABCDEK). Ajoitus ei ole vähäisempi, pienillä epälineaarisilla muodonmuutoksilla, näkökulman poistamisen jälkeen rungon muoto ja mitat käytännössä uusiutuvat (dilyanka AB grafiikka). Maksimijännitettä, jolla ei vielä tapahdu merkittävää ylimääräistä muodonmuutosta, kutsutaan jousien välissä σ pakkaus Tämä näyttää pisteet U kaavioita. Jousien välinen ero vaihtelee suhteiden välillä vain 0,33 %. Useimmiten ikätoverit kunnioittavat heitä.
Jos ulkoinen vaatimus on sellainen, että rungossa on jännityksiä, jotka liikkuvat elastisuuden välillä, niin muodonmuutoksen luonne muuttuu (kappale BCDEK). Jännityksen poistamisen jälkeen silmät eivät ota etumittojaan, mutta ne eivät enää deformoidu, vaikkakin vähäisemmässä määrin, vaikka niitä levitettäisiin (plastinen muodonmuutos).
Kimmoisuuden rajan yli annetulla jännitysarvolla, joka osoittaa pisteen Z kaavioissa kasvi kasvaa käytännössä lisäämättä sen merkitystä (dilyanka CD kaaviot voivat olla vaakasuuntaisia). Tätä ilmiötä kutsutaan materiaalin tasaisuus.
Kun jännite kasvaa edelleen, jännite liikkuu (pisteestä D), silloin ääni ("niska") kehittyy silmän pienempään osaan. Leikkausalueen muutosten kautta (kohta E) jatkokäyttöön tarvitaan vähemmän jännitettä, muuten syklin loppu alkaa (kohta Ennen). Suurinta jännitystä, joka voidaan nähdä rikkoutumatta, kutsutaan sosiaalisuuden raja – σ pch (tämä osoittaa pisteen E kaaviot). Sen merkitys on materiaalin ja sen materiaalien luonteessa.
Katsotaanpa nivelen muodonmuutos. Tätä varten otamme yksittäisen kappaleen, joka on suorakaiteen muotoinen suuntaissärmiö, ja voima kohdistetaan sen pisimpiin pintoihin, suoraan näiden pintojen suuntaisesti. Voima jakautuu tasaisesti liitospinnan koko pinnalle S, niin missä tahansa näiden pintojen rinnakkaisessa leikkauspisteessä jännitys on tangentiaalinen
Pienillä muodonmuutoksilla rungon tilavuus ei käytännössä muutu, ja muodonmuutos tarkoittaa, että suuntaissärmiön pallot romahtavat yksitellen. Siksi tällaista muodonmuutosta kutsutaan nivelen muodonmuutos.

Jos nivel on epämuodostunut, olipa se suora, kohtisuoraan selkärankaa vaakapalloihin nähden, käännä oikeaan kulmaan. Kenen lopussa on suhde
![]() ,
,
de - zsuwu-moduuli Mitä makaa vain kehon materiaalin voimalla.
Liitoksen muodonmuutos pienennetään tasaisiksi muodonmuutoksiksi niin, että jos kaikki rungon tilavuuden äärettömän pienet elementit kuitenkin deformoituvat.
On kuitenkin olemassa heterogeenisiä muodonmuutoksia. huomioi tämä käänne.


Otetaan yksi pora, kiinnitetään sen yläpää ja kohdistetaan vääntövoima alapäähän, mikä luo vääntömomentin M Anna myöhäisen akselin heitellä. Se pyörii - rungon alaosan ihon säde pyörii leikkauksen myöhempää akselia pitkin. Tätä muodonmuutosta kutsutaan vääntövoimaksi. Hooken laki vääntömuodonmuutokselle kirjoitetaan muodossa
de - tietyn murto-osan vakioarvo, jota kutsutaan її vääntömoduuli. Aseta etumoduulien lisäksi materiaalin lisäksi myös materiaalin geometriset mitat.